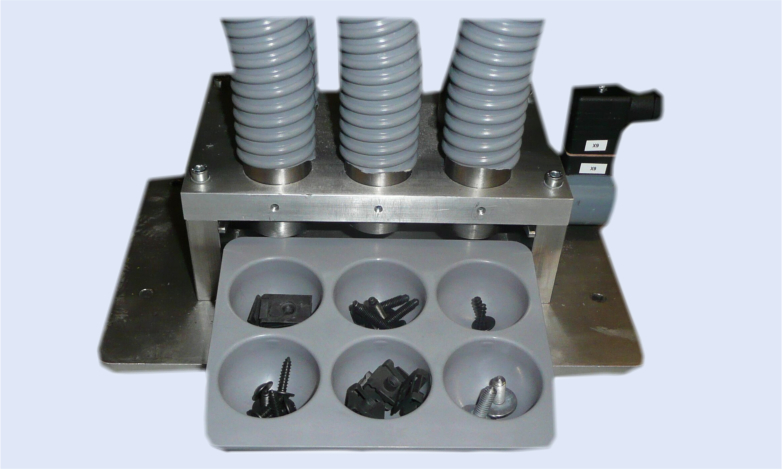
Teile werden per Hand entnommen
Teile werden in Boxen sortiert entnommen
Teile werden in Trays von Robotern übernommen
Teile werden durch Einschieben eines Handschraubers auf einen Magneten übernommen